|
I am a CS graduate student at Georgia Tech specializing machine learning and quantum hardware. My training is in computer engineering and physics, with hands-on experience in data acquisition,digital signal processing, and physics simulation. I am drawn to porblems that sit at the boundary of physical systems and softwares. I currently work as a Software Developer at Fermilab, where I build production data systems and LLM-based developer tools. In my spare time, I enjoy practicing archery, playing the piano, and solving puzzles. Email / CV / Google Scholar / LinkedIn / Github |
|
|
|
|
|
|
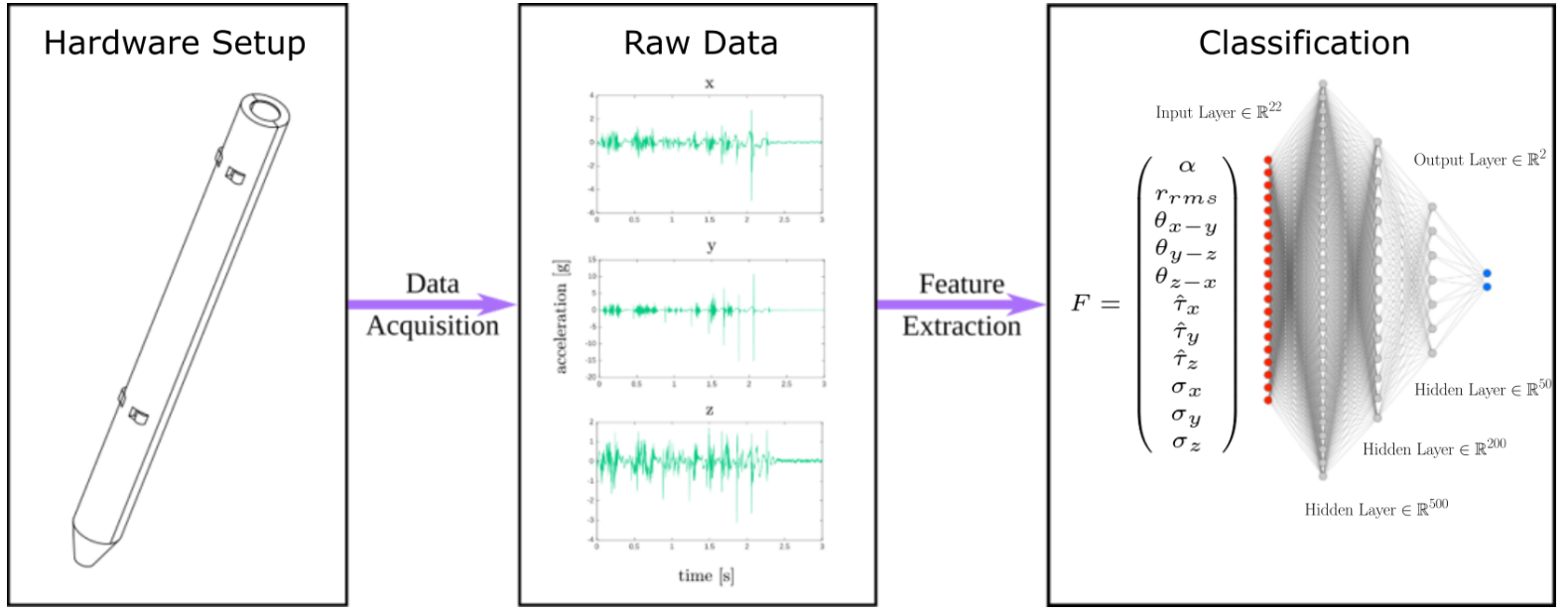
Divas Subedi, Digesh Chitrakar, Isabella Yung, Yicheng Zhu, Yun-Hsuan Su, Kevin Huang 2023 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2023 paper / presentation This work is extension of previous iteration of signature pen project. This iteration presents a working prototype of the signature pen along with better features used to authenticate users. The pen captures initial data of the motion while performing the signature, which is then processed through signal techniques to create interpretable features. These features train a neural network to authenticate user. In this iteration, the temporal and spatial distribution of energy while performing signature is used to determine if the signature is authentic or not. |
|
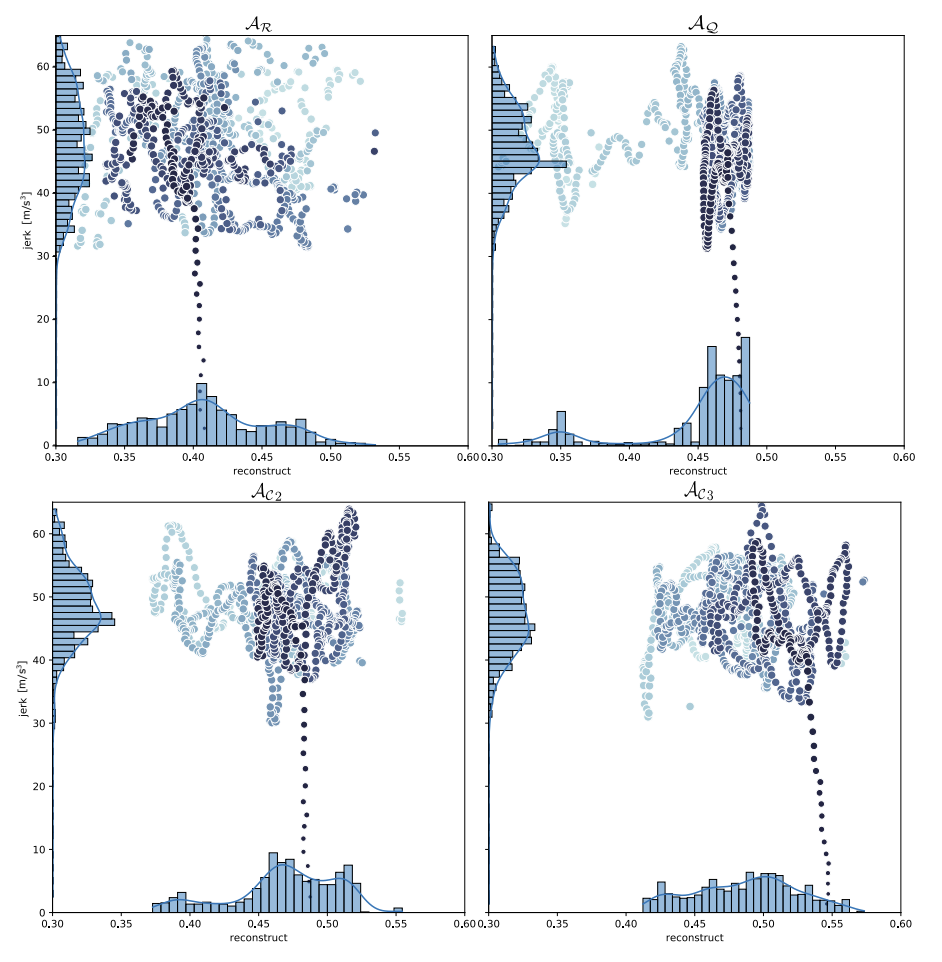
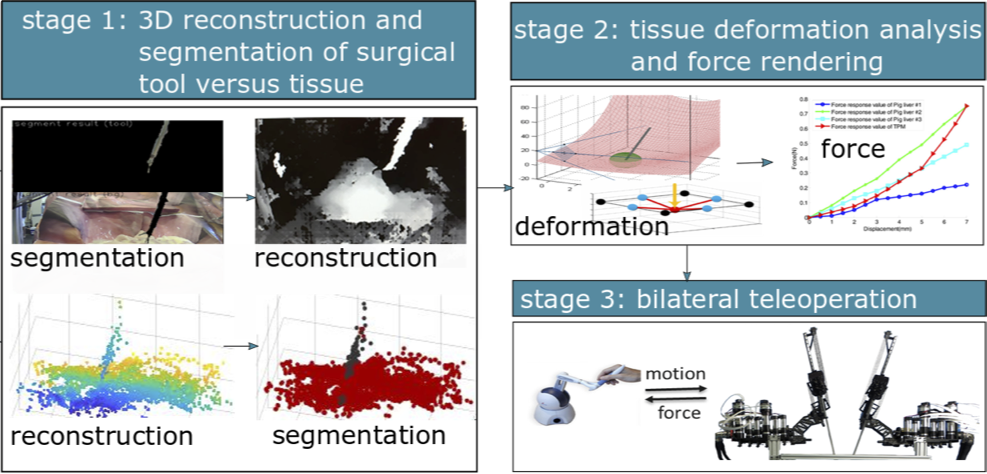
Divas Subedi, Wenfan Jiang, Ramisa Tahsin Rahman, Heidi Zhang, Kevin Huang, Yun-Hsuan Su 2023 International Symposium on Medical Robotics (ISMR), 2023 paper This work presents a curiosity driven camera positioning algorithm for multicamera systems in robot-assisted minimally invasive laparoscopic procedures. Building on prior curiosity driven movement algorithms, a jerk-minimization term is introduced in the extrinsic curiosity reward function to improve trajectory smoothness. The approach is benchmarked against six baseline algorithms using visual and motion metrics, evaluated on a laparoscopic simulation with dynamic tissue, simulated breathing, and virtual tool-tissue interactions. |
|
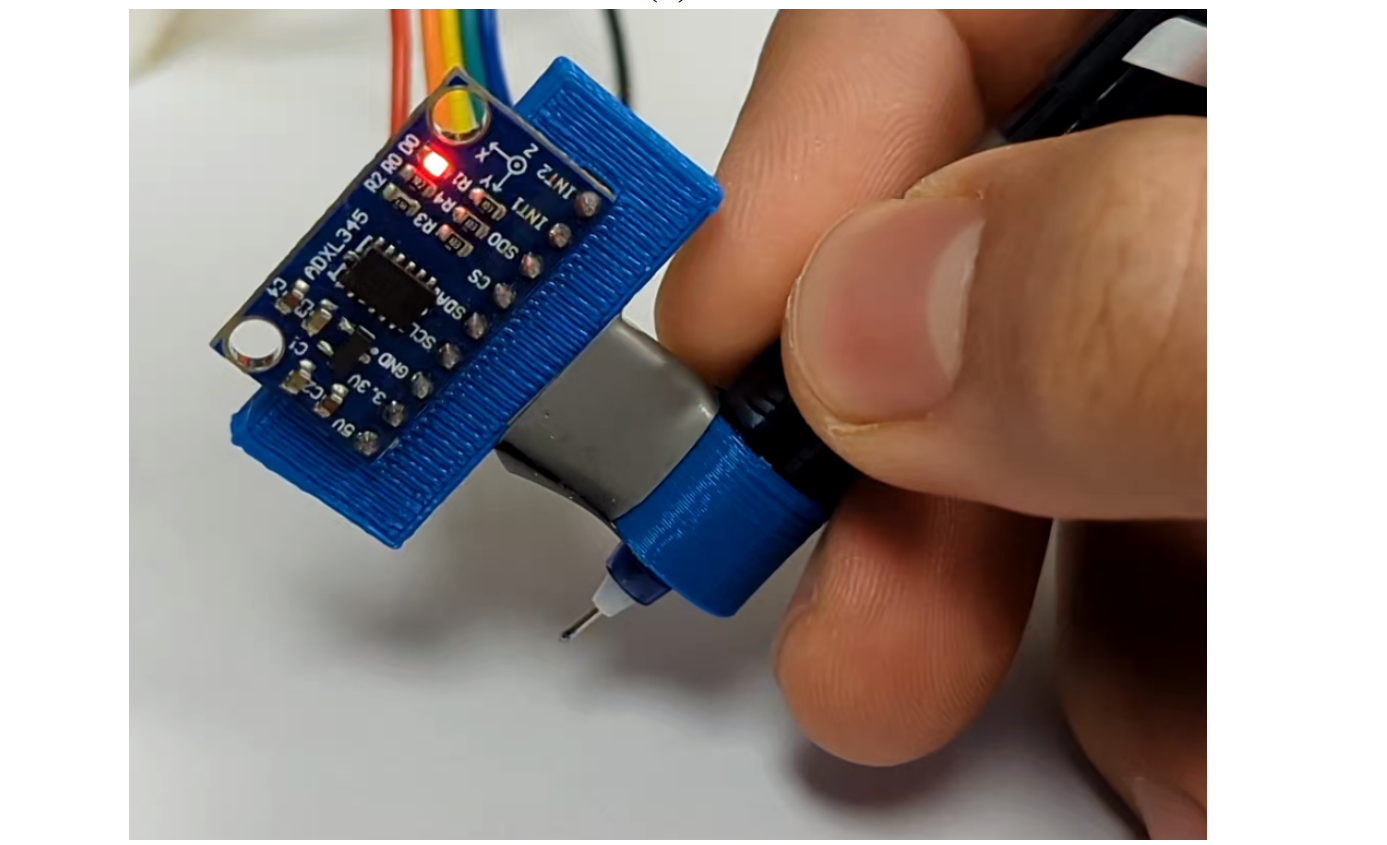
Divas Subedi, Isabella Yung, Digesh Chitrakar, Kevin Huang 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), 2022 paper / poster The project proposes a writing stylus that authenticates users through unique inertial signature detection, leveraging the individuality of handwritten signatures. It features dual triaxial accelerometers to analyze stroke style, and writing speed, creating a distinct signature profile. The profile is used to determine if the signature is fake or not. Preliminary studies show a high accuracy of 95.7%, 100% sensitivity, and 90% recall, indicating its effectiveness in user identification and potential in enhancing cybersecurity. |
|
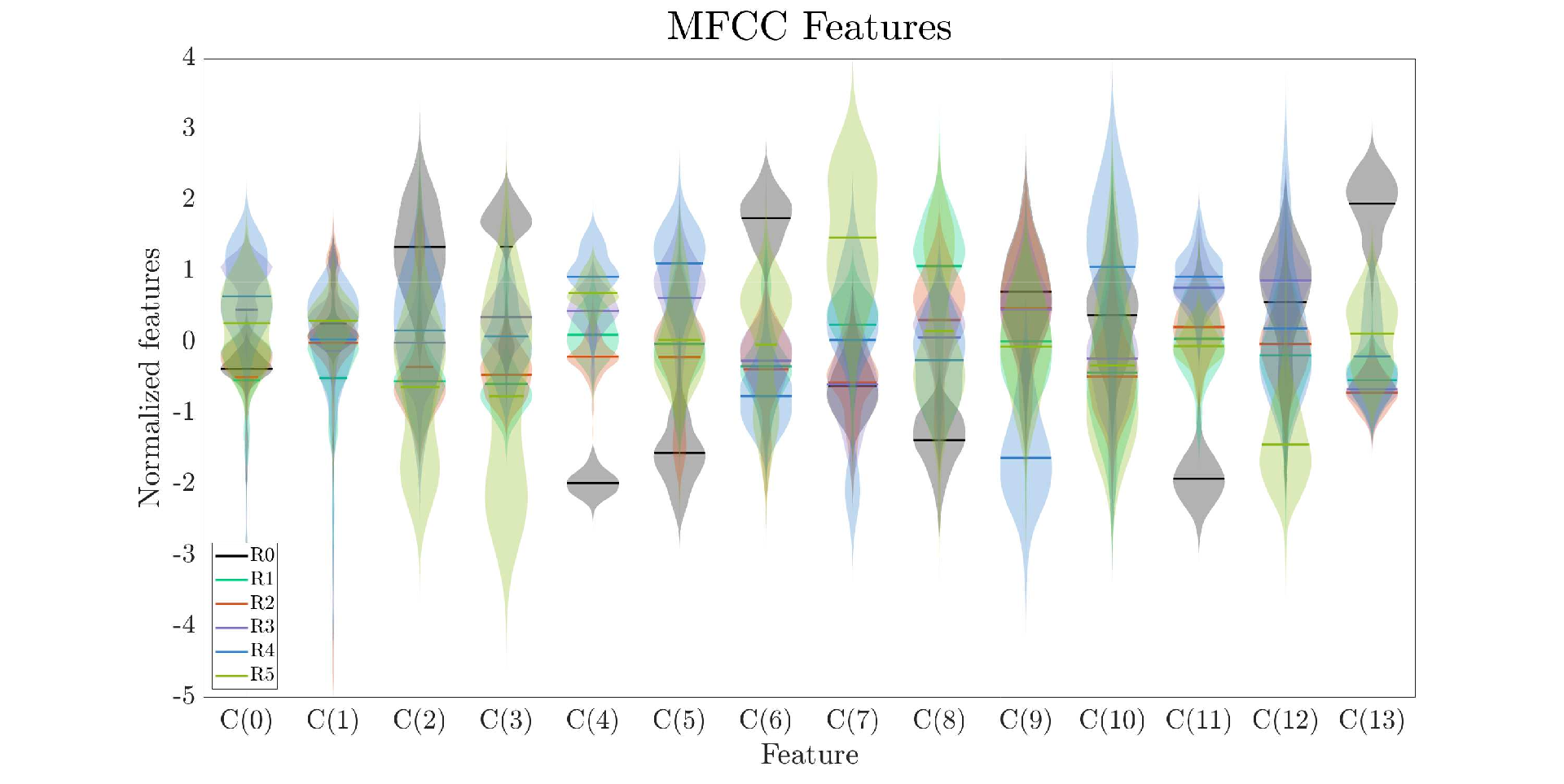
Divas Subedi, Elizabeth Schoemer, Digesh Chitrakar, Yun-Hsuan Su, Kevin Huang 14th IEEE/SICE International Symposium on System Integration (SII), 2022 paper / presentation This work is extension of previous iteration of contact sensing project. In addition to expansion of feature space in baseline approach, MFCC are used to create better features. With more contact locations and features, the proposed method is promising, as it presents more complexity and discrimination at higher granularity of localization with higher accuracy. |
|
Kevin Huang, Divas Subedi, Rahul Mitra, Isabella Yung, Kirkland Boyd, Edwin Aldrich, Digesh Chitrakar MDPI Applied Sciences, 2021 paper This work introduces the idea of extending teleoperation to enable real time human remote control of legged robots, or telelocomotion, to traverse challenging terrain. A haptic telelocomotion interface was developed. Two within-user studies validate the proof-of-concept interface and our results are promising to the use of haptic feedback for telelocomotion in complex traversal tasks. This work builds on our 2020 IRC poster paper. |
|
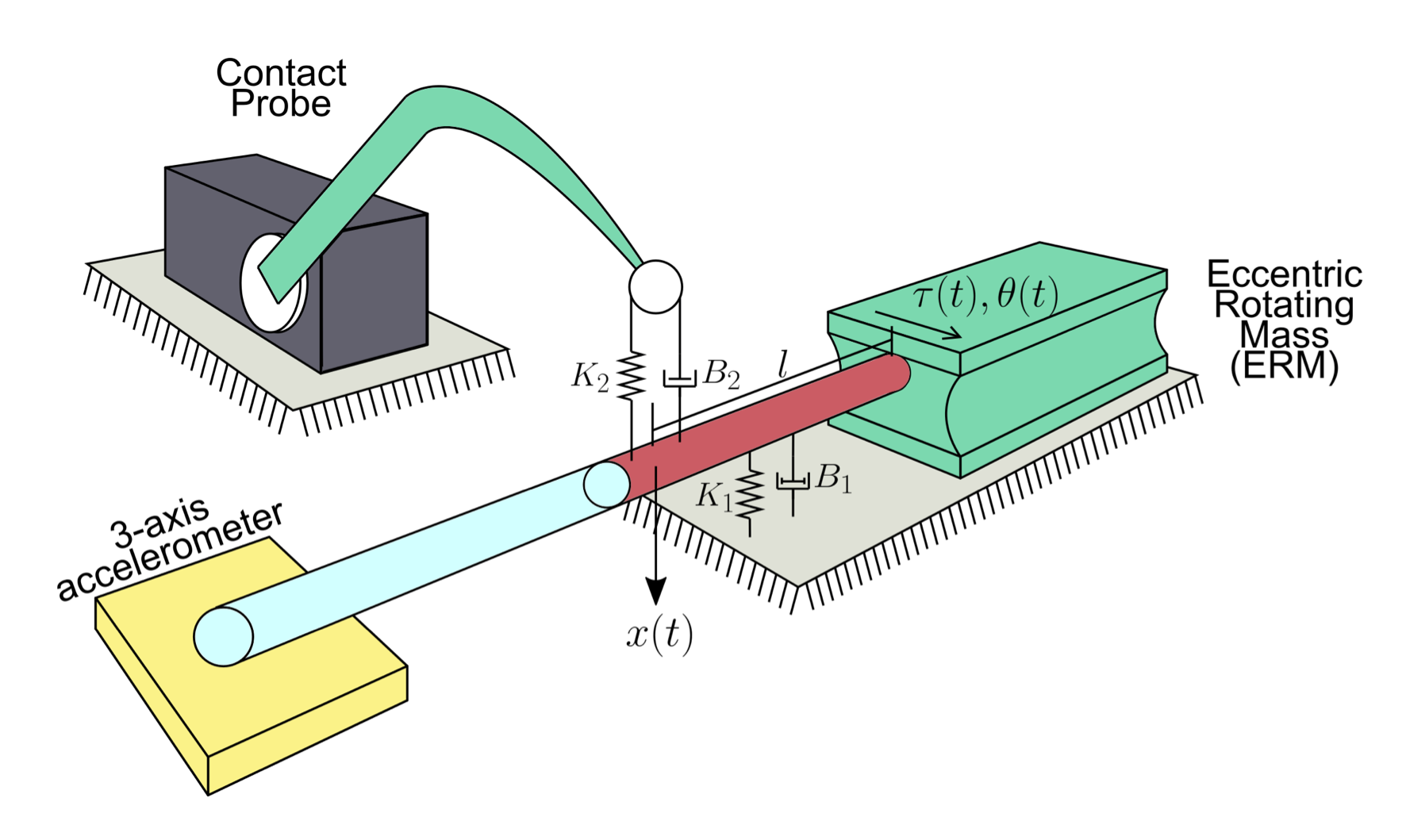
Rahul Mitra, Kirkland Boyd, Divas Subedi, Digesh Chitrakar, Edwin Aldrich, Ananya Swamy, Kevin Huang 3rd International Conference on Mechatronics, Robotics and Automation (ICMRA), 2020 paper In this work, a contact sensor that is minimally intrusive and can be subsumed into extant devices is prototyped and tested. Oscillatory acceleration data is collected and subsequently used to train and classify different contact locations using frequency-based features. Three separate classes are distinguished according to contact location. Results are promising and show excellent classification of both contact and contact location. |
|
Kevin Huang, Digesh Chitrakar, Rahul Mitra, Divas Subedi, Yun-Hsuan Su 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), 2020 paper This work attempts to empirically evaluate the degree to which haptic feedback may deviate from ground truth yet result in acceptable teleoperated performance in a simulated RMIS-based palpation task. A preliminary user-study is conducted to verify the utility of the simulation platform, and the results of this work have implications in haptic feedback for RMIS and inform guidelines for vision-based tool-tissue force estimation. |
|
Divas Subedi and Deborah A. Fixel COMSOL Conference, 2019 paper / poster / presentation The effect of constant-field scaling on a FIBMOS (focused-ion-beam metal-oxide-semiconductor) device compared to the conventional MOSFET (metal-oxide-semiconductor field-effect transistor) is studied in this paper. A narrow P+ region with a higher doping concentration than the substrate is implanted next to the source region to implement FIBMOS. The simulation is conducted on a conventional MOSFET as well as a FIBMOS transistor for 122.5-nm, 175-nm, 245-nm, and 350-nm channel-length devices. The simulations show that the FIBMOS device demonstrates greater threshold voltage stability upon channel length variation, improved output resistance, greater resistance to the punch-through effect, and reduced hot electron degradation. |
|
|
|
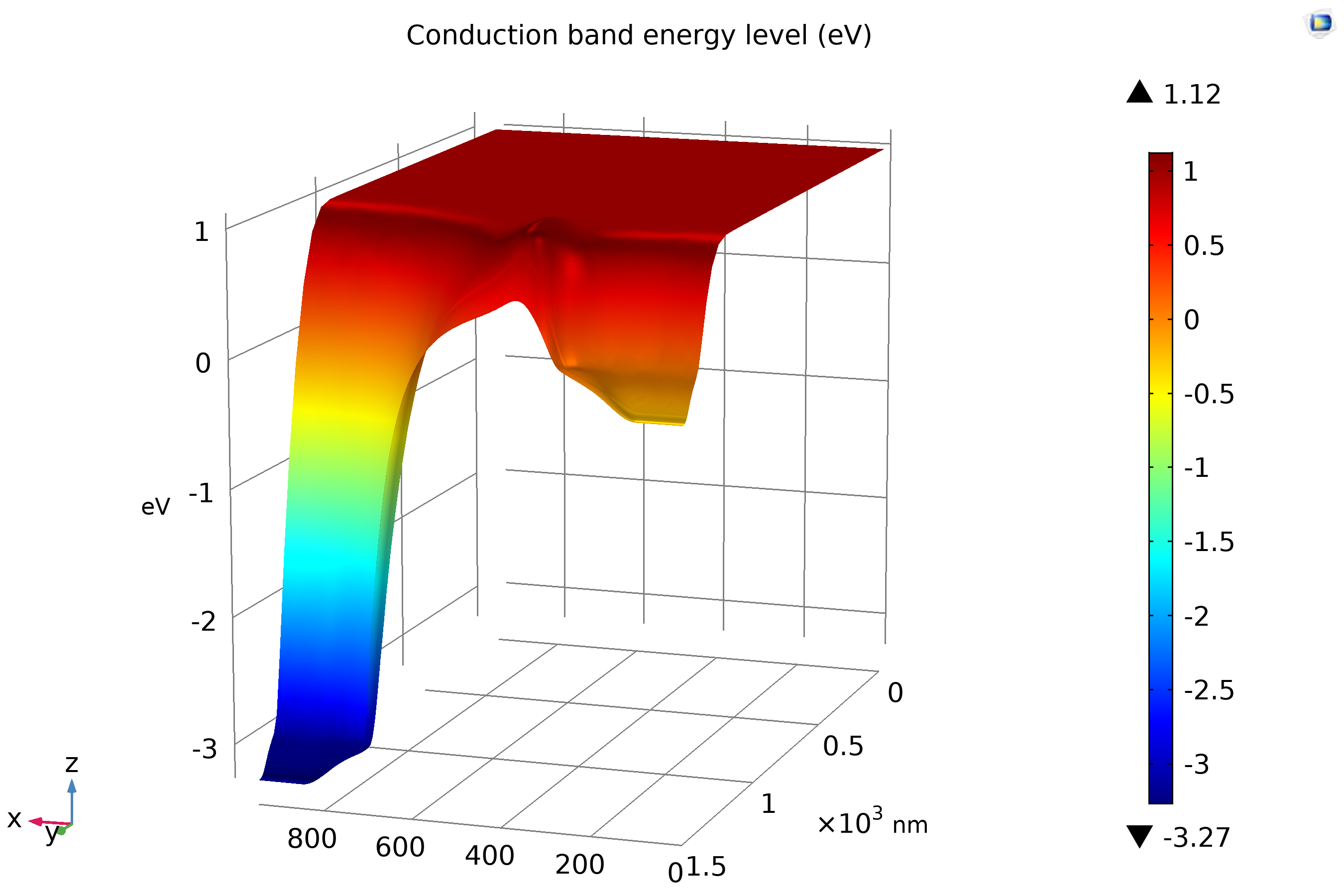
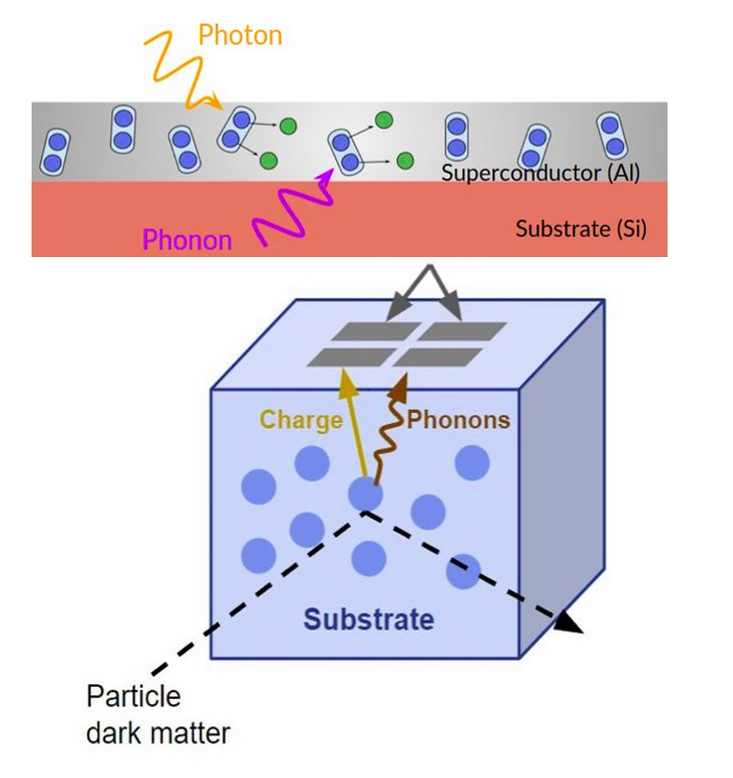
Divas Subedi, Kelly Stifter Fermilab / SLAC, SIST 2022, 2022 paper / presentation / poster This project investigated quantum sensor technologies for detecting light dark matter, focusing on Microwave Kinetic Inductance Detectors (MKIDs) coupled to cryogenic substrates. The goal is to understand phonon-mediated signal formation from sub-eV energy deposition events. I developed a Monte Carlo simulation framework using Geant4 with the G4CMP library to model charge generation, phonon transport, and phonon collection in a simplified MKID detector geometry. Python was used to generate batch simulation macros, manage parameter sweeps (energy, interaction position, momentum), and perform data analysis and visualization. The simulations produced spatial phonon hit profiles, collection time distributions, and energy spectra at the superconducting electrode, enabling characterization of detector response and sensitivity limits. This work helped identify modeling limitations in current G4CMP implementations and informed future detector and simulation refinements for sub-meV resolution dark matter searches. |
|
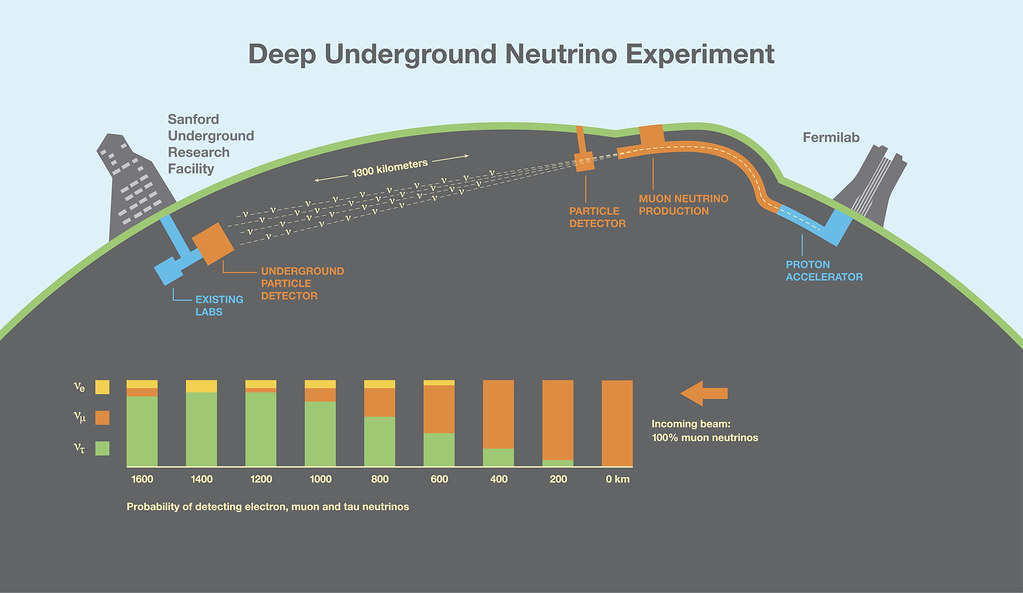
Divas Subedi, Michael J. Utes, Paul M. Rubinov Fermilab, SIST 2021, 2021 paper / presentation / poster This project involved the design and implementation of GIZMo (Ground Impedance Monitor) for the DUNE far detector, which requires a strict single-point grounding scheme to maintain low-noise operation. GIZMo monitors the impedance between detector ground and building ground in real time to detect unintended ground connections. I developed the signal processing and impedance estimation pipeline using lock-in amplifier techniques, including quadrature demodulation and phase-based estimation. The system was modeled in LTSpice to study parasitic effects and select operating frequencies. I built Python tools using SciPy for simulation, calibration, and nonlinear optimization of circuit parameters, including modeling a saturable inductor. The final system was deployed on a Zynq SoC, combining FPGA-based timing control with Linux-based Python DSP for real-time monitoring and alerts. |
|
|
|
|